「ロボット知能化演習」ロボットコンテスト2014開催
ロボット知能化演習の課題
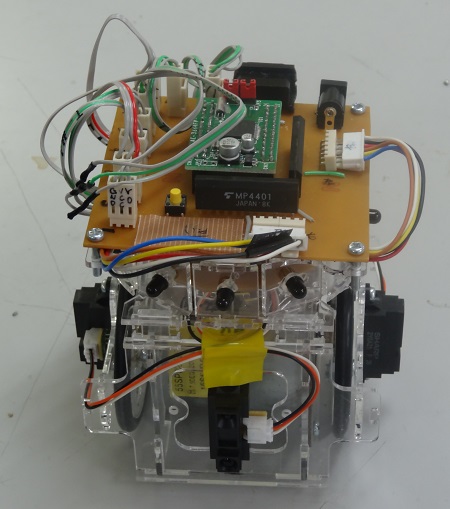
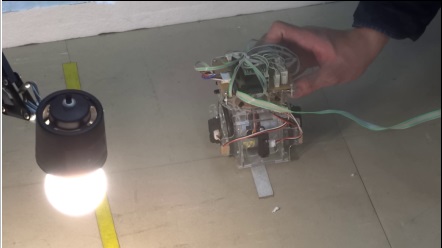
キューブロボット
ロボットものづくりの内、ロボット制御するソフトウエアに重きをおいた演習です。アクリル製の直方体の筐体で、2個のステッピングモータ駆動の車輪で移動します。前後左右に赤外線を用いた距離センサを搭載しています。ロボット上部には、前後左右の光量を計測する光センサを搭載しています。全ての方向の光を見逃さないように、12個の光センサを等間隔で設置し、3個一組で前後左右各方向の光を検出するようにしています。ロボットコンテストの課題は、距離センサで壁までの距離を知り、光センサでランプを見つけ、壁にぶつからないようにして、早くランプのそばに近づくことです。この制御をロボット内のマイコンにダウンロードしたプログラムで自律的に行います。動画でロボットにつながっているコードは電源用のコードで、パソコンとの通信用のコードではありません。ロボットコンテストは、2015年2月5日に開催されました。
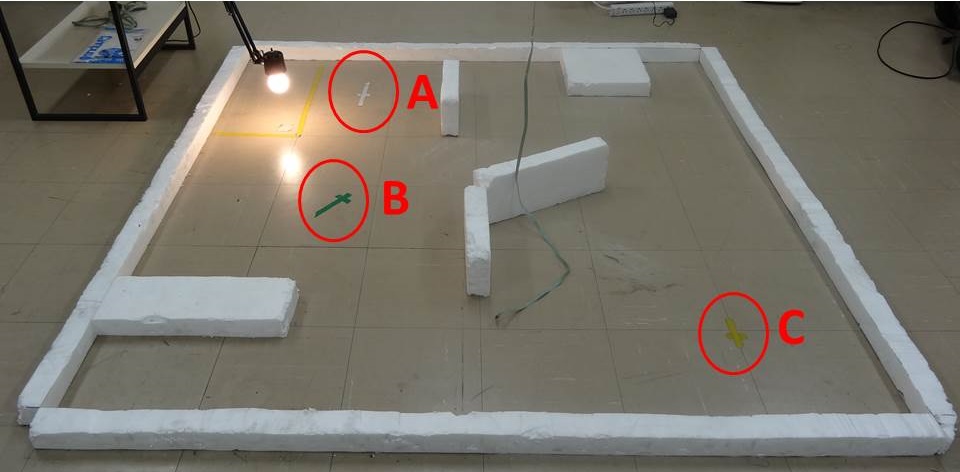
コンテストのフィールド
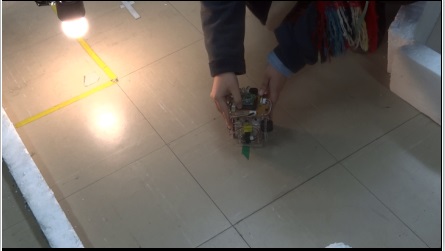
コンテストの様子


ロボットの動画
| A地点からの制御 | B地点からの制御 |
 |
 |
| C地点からの制御(1) | C地点からの制御(2) |
 |
 |
コンテスト結果
A地点、B地点、C地点からランプ近くに到達するまでのタイムトライアルを行った。下記の表は各地点からの最短タイムである。今年度はC地点からゴールに到達できたロボットが多く、全体的に優秀であった。| 班 | A地点 (s) | B地点 (s) | C地点 (s) | 順位 |
| A | 1.41 | 3.82 | 33.27 | 8 |
| B | 1.67 | 2.94 | 42.8 | 11 |
| C | 3.29 | 2.88 | 87.29 | 14 |
| D | 4.76 | 3.86 | 192.4 | 16 |
| E | 5.87 | - | 30.9 | 7 |
| F | 5.6 | 6.07 | 21.63 | 4 |
| G | - | - | - | - |
| H | - | - | - | - |
| I | 3.16 | 2.33 | 10.52 | 1 |
| J | 13.84 | - | - | - |
| K | 3.26 | 24.26 | 57.59 | 13 |
| L | 2.03 | 3.75 | 25.03 | 5 |
| M | - | 3.4 | - | - |
| N | 3.53 | 2.83 | 12.57 | 2 |
| O | 1.39 | 2.72 | 37.2 | 10 |
| P | 5.57 | 11.6 | 26.66 | 6 |
| Q | 2.42 | 7.52 | - | - |
| R | 1.49 | 2.94 | 16.24 | 3 |
| S | 5.57 | 3.76 | 99.83 | 15 |
| T | 2.25 | 8.49 | 37.19 | 9 |
| U | 5.57 | 22.86 | 43.25 | 12 |